Nanopositioniertische mit Piezomotor
Das Grundprinzip der Stick-Slip-Trägheitsbewegung ist die kontrollierte Nutzung der Reibung in Verbindung mit der Trägheit des beweglichen Teils.
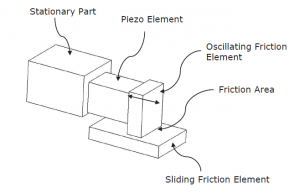
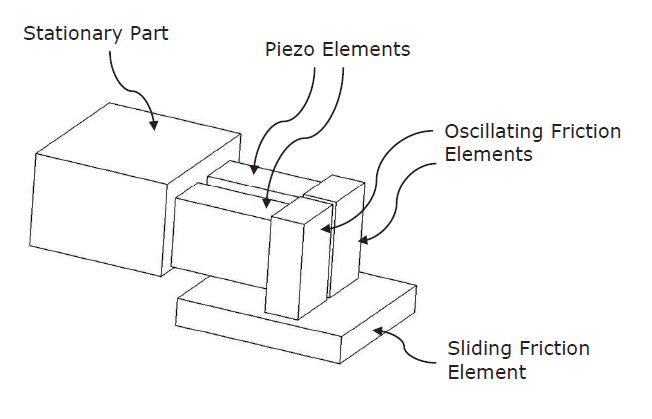
Wie in der Zeichnung unten dargestellt, ist ein oszillierendes Piezo Element mit einem Reibungselement verbunden, dass das Gleitreibungselement nach vorne bewegt, wenn sich der Piezo aufgrund einer angelegten Spannung ausdehnt.
Wenn der Piezo vollständig ausgefahren ist, was normalerweise nach einer Verlängerung von ca. 1 μm der Fall ist, wird ein schneller Spannungswechsel angelegt, der den Piezo schnell in seine ursprüngliche Position zusammenzieht.
Das Ergebnis ist eine schnelle Rückwärtsbewegung des oszillierenden Reibungselements. Die Trägheit des Gleitreibungselements ist jedoch zu groß, um dieser Rückwärtsbewegung vollständig zu folgen.
Das Hauptproblem bei herkömmlichen Stick-Slip-Piezomotoren besteht darin, dass das Gleitreibungselement (beweglicher Teil des Tisches) während der Schlupfphase der Rückwärtsbewegung in unterschiedlichem Maße folgt. Infolgedessen kommt es zu einer schlechten Geschwindigkeitsregulierung, Vibrationen im System und zu Bewegungseinbrüchen.










Vergleich Stick-Slip Piezo
-
- Traditioneller Stick-Slip Piezo

-
- Micronix Multi-Stick-Slip Piezo
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
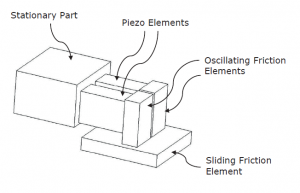
Multi-Stick-Slip Piezomotor:
Die Grafik zeigt die signifikante Verbesserung durch den Einsatz des Multi-Phase Stick-Slip Piezomotors von MICRONIX. Dieser Motor verringert oder eliminiert die Rückwärtsbewegung während der Schlupfphase, da er nicht nur auf die Trägheit des beweglichen Teils angewiesen ist. Stattdessen verwendet der MICRONIX-Piezomotor mindestens zwei Piezos und zwei Reibungselemente, die sich im Gleichtakt bewegen, aber zu unterschiedlichen Zeiten rutschen. Mindestens ein Element bleibt in der Stickphase, während das andere rutscht. Dadurch wird die durch die Gleitkraft auf das Gleitelement induzierte Rückzugskraft und Bewegung reduziert oder ganz eliminiert. Die Verwendung des Mehrphasenprinzips führt zu erheblichen Leistungssteigerungen gegenüber Einphasenmotoren, einschließlich:
- Höheren Bewegungskräften
- Besserer Geschwindigkeitsregulierung – sanfterer Bewegung
- Weniger induzierten Vibrationen
- Effizienterer Bewegun
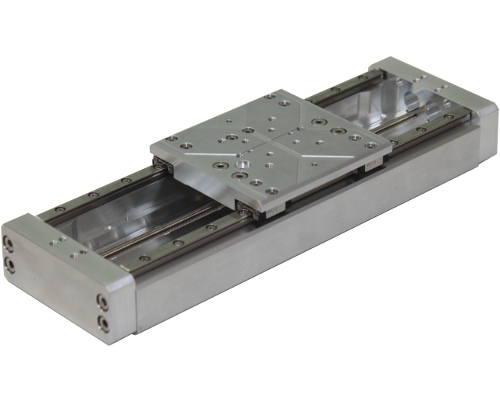
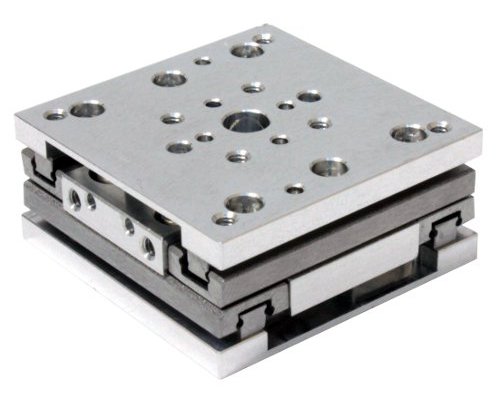
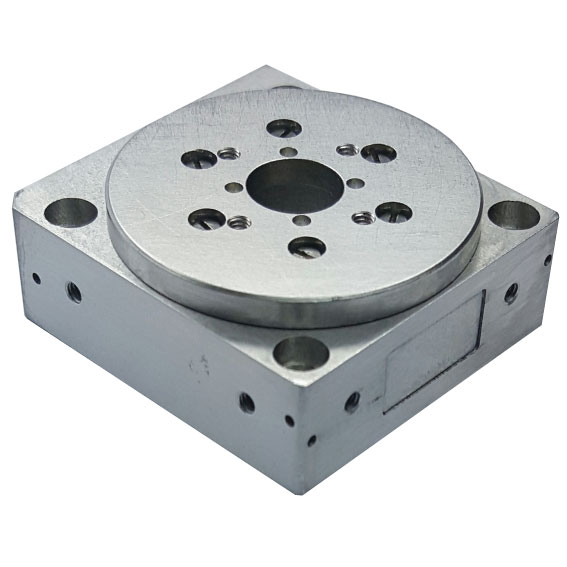
Übersicht der piezogetriebenen Achsen
| Name | Typ | Verfahrweg in mm | Last in kg | Encoder | Umgebung neben Atmosphärisch |
|---|---|---|---|---|---|
| PP-12 | Linear | 4 | 0.25 | Digital | HV, UHV |
| PP-18 | Linear | 12, 18, 26 | 0.5 | Digital | - |
| PPS-20 | Linear | 12, 18, 26, 51 | 2 | Analog, Digital | HV, UHV, Nicht-magnetisch, Cryo |
| PPS-28 | Linear | 26, 51, 76, 102 | 5 | Analog, Digital | HV, UHV, Nicht-magnetisch, |
| PPS-60 | Linear | 25, 50, 100, 200, 300 | 15 | Analog, Digital, Digital (low cost) | HV, UHV, Nicht-magnetisch, |
| PPS-110 | Linear | 100, 200, 300, 500, 1000 | 25 | Digital | HV, UHV |
| PPX-32 | XY | 18x18 | 1 | Analog, Digital | HV, UHV |
| PPX-50 | XY | 28x28 | 3 | Analog, Digital | HV, UHV, Nicht-magnetisch |
| PR-32 | Rotation | 360° | 1 | Analog, Digital | HV, UHV |
| PR-50 | Rotation | 360° | 3 | Analog, Digital | HV, UHV |
| PR-160 | Rotation | 360° | 10 | Analog, Digital | HV, UHV |
| PG-50 | Goniometer | +-5° | 2 | Analog, Digital | HV, UHV |
| ES-50PM | Hub | 10 | 1 | Analog, Digital | HV |
Steuerung:
Der MMC-100 ist ein leistungsstarker Piezomotorsteuergerät. Er ermöglicht Geschwindigkeiten über 2 mm/s (MMC-110 bis 5 mm/s) mit dem zum Patent angemeldeten mehrphasigen Piezomotor bei Auflösungen von 1 nm. Mehrere Einheiten können als kompaktes Mehrachsmodul gestapelt werden und über ein einziges USB- oder RS-485-Kabel mit einem Computer verbunden werden. Die MICRONIX Motion Control Language ermöglicht eine einfache Programmierung durch einfache Befehle.